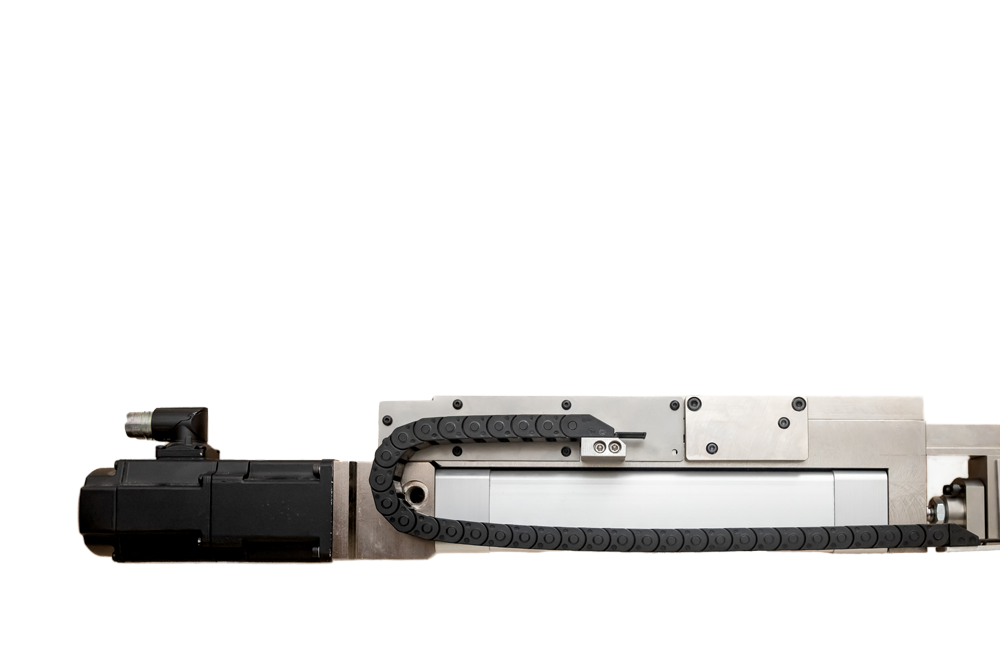
La technologie servopresse pilotée par MecaMotion transforme votre quête de tranquillité en réalité industrielle.
Précision absolue, réduction drastique des rebuts et faible consommation énergétique : trois leviers qui améliorent significativement l’efficience de votre production.
La servopresse et son logiciel MecaMotion, c’est l’alliance parfaite entre intelligence logicielle et performance mécanique pour tous vos process : assemblage, rivetage, marquage, emboutissage, et bien plus encore.
En savoir plus
Ce que vous cherchez, ce n’est pas juste des machines.
C’est que vos équipes arrêtent de perdre du temps sur du répétitif pour se consacrer à ce qui compte vraiment. L’automatisation, c’est précisément cela : éliminer le répétitif, réduire l’erreur humaine, améliorer votre rentabilité – sans jamais transiger sur la qualité.
Softeca SA imagine et réalise des solutions sur mesure, pensées pour révéler le plein potentiel de vos collaborateurs et de votre outil de production.
Parlons de vos défis. Explorons ensemble ce que l’automatisation peut vous offrir.
En savoirGrâce à sa commande électrique pour servopresse couplée à sa plateforme de programmation MecaMotion, SOFTECA S.A. est le partenaire idéal.
TOUT VOIR




Donner aux industriels les moyens de transformer leurs défis en opportunités, en repoussant ensemble les limites de l’automatisation pour créer un monde productif plus humain, plus durable et plus performant.
Nous existons parce que nous croyons que la technologie n’a de valeur que lorsqu’elle sert l’humain et respecte notre planète. Chaque défi technique est pour nous une occasion de réinventer l’industrie de demain.
Vous ne faites pas qu’acheter des systèmes d’automatisation. Vous choisissez un partenaire qui comprend que derrière chaque défi de production, il y a des enjeux humains et environnementaux.
Nous existons pour vous aider à :
Notre promesse : Votre succès est notre raison d’être. Votre performance est le reflet de la nôtre.
Vous n’occupez pas un poste. Vous portez une mission.
Nous existons pour vous offrir :
Notre promesse : Votre épanouissement est notre moteur. Nous réussissons ensemble
Vous n’êtes pas des prestataires. Vous êtes des alliés.
Nous existons pour construire avec vous :
Notre promesse : Votre engagement est notre force. Nous grandissons ensemble.
Pour donner vie à notre raison d’être, nous nous engageons à :
Softeca continuera d’avancer, par tous les temps, avec la même conviction : l’automatisation n’est pas une fin en soi, mais un moyen de libérer le potentiel humain tout en préservant notre planète.
Nous ne proposons pas seulement des solutions industrielles. Nous construisons un avenir où l’industrie est plus propre, plus silencieuse, plus intelligente et plus respectueuse de ceux qui la font vivre.
L’arbre pousse en silence, la rivière creuse la pierre goutte après goutte. Ce que l’on construit avec soin traverse le temps. Ce que l’on construit avec soin devient durable.
Raphaël Ceccucci
Softeca SA
Chez Softeca, nous croyons que chaque machine raconte une histoire — celle d’un défi technique transformé en solution fiable et élégante.
Notre équipe d’experts en automation, logiciels industriels et servopresses sur mesure accompagne les industriels depuis l’idée jusqu’à la mise en production. Nous ne livrons pas simplement des machines : nous concevons des solutions intelligentes, adaptées à vos processus, pensées pour durer et évoluer avec vous.
Avec Softeca, l’innovation devient un outil concret au service de votre performance.

Je suis passionné par le processus de transformation d’une idée en une solution industrielle opérationnelle. J’y vois une opportunité de travail d’équipe pluridisciplinaire pour donner vie à des mécanismes, des automatismes ou des machines à la fois robustes et innovants.

Là où l’humain conçoit, l’automate prolongent la pensée. Notre force réside dans cette synergie : une intelligence mêlée, humaine et artificielle, qui imagine et bâtit dès à présent l’industrie de demain.

Passionné par l’art de donner vie aux machines : je conçois des systèmes où chaque capteur et actionneur joue sa partition avec une précision absolue.

Concevoir et améliorer des solutions techniques fiables, transformer des idées en pièces concrètes et fonctionnelles, et contribuer à des machines plus efficaces pour faciliter le travail de l’équipe et des clients.

Ce qui me passionne dans l’automation, c’est le défi d’application du physique au logiciel .

Ce qui fait notre force ici, c’est bien plus qu’une équipe ; c’est un état d’esprit. Le vrai plaisir, c’est quand, face à un défi complexe, on met nos expertises en commun. Voir la solution la plus robuste émerger de notre collaboration, c’est ce qui nous rend fiers. Ensemble, on ne livre pas juste un système fiable, on crée quelque chose dont on est collectivement responsables.

Si l’on ajoute à quelque chose de visuellement beau à regarder un savant mélange d’ingéniosité humaine et de puissance mécanique et électrique, c’est tout simplement passionnant.

Ce qui m’inspire, c’est que grâce à la concentration et à la précision, nous transformons des composants ordinaires en ensembles électromécanique parfaitement ajustés, capables de fonctionner de manière synchronisée, tel un organisme parfaitement orchestré.

Grâce à une bonne coordination et planification des différents services, cela nous permet de répondre de manière plus efficace et rapide aux besoins des clients.

Vous avez un besoin concret, un process à fiabiliser ou un projet d’automation à discuter?
Donnez-nous quelques élément et nous revenons vers vous rapidement.
DEMANDER UN ÉCHANGE