
Presse universelle MecaMotion par 
Procédure de dégagent en cas surcharge
Lors d'une surcharge il y a deux cas de figure possible. Premièrement, une surcharge faible acceptée par le système qui n'enclenchera pas le blocage moteur (les leds du drive restent vertes) et permettra un dégagement automatique. Autrement une surcharge brutale et importante qui va entraîner le blocage du moteur (les leds du drive passent au rouge) et la seule option sera un dégagement avec la commande manuelle.
Dégagement automatique
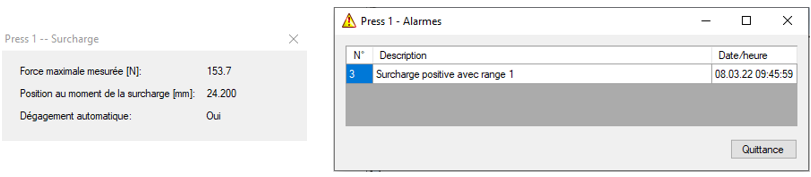
Figure 1: Alarme avec dégagement automatique
Pour être utilisé, le dégagement automatique doit être activé au paramètre n°37 et fonctionnera tant que les leds du drive restent vertes lors de la surcharge.
Lors de la surcharge avec dégagement automatique le système réagira de la manière suivante:
1.Affichage de l'erreur;
2.Quittance automatique de l'erreur;
3.Dégagement d'environ 2 [mm] à vitesse très lente
4.Déplacement jusqu'à la position défini dans le paramètre n°38 en fonction de la vitesse et de l'accélération définies dans les paramètres n° 39 et 40;
5.Affichage de l'erreur pour signifier le problème survenu.
Dégagement manuel

Figure 2: Alarme sans dégagement automatique
Dans les paramètres par défaut, c'est l'utilisation du dégagement manuel qui est prévu lors d'une surcharge. Sont fonctionnement permet l'utilisation autant lors d'une surcharge faible (les leds du drive restent vertes) que lors d'un blocage moteur entraîner par une surcharge brutal et importante (les leds du drive passent au rouge).
Pour ce dégager de la situation la procédure est la suivante:
1.Quittancé l'erreur pour pouvoir utiliser la commande manuelle se trouvant sur la fenêtre commande;
2.Ouvrir la commande manuelle;
3.Effectuer un reset de la force pour ne plus être bloqué par la limite de force;
4.Utilisé la commande JOG pour déplacé l'axe;
Si besoin
5.Effectuer un second reset de la force dans le cas où l'erreur apparait de nouveau;
6.Utilisé la commande JOG pour terminer le déplacement de l'axe.
