
Presse universelle MecaMotion par 
"Clamping" instruction
This instruction allows you to apply a force with the press for a given time using the internal force value of the motor expressed in newton [N].
This instruction uses the torque limiting function of the motor to work, so the axis moves until it reaches the force setpoint and when it is reached the axis maintains this force.
Use of the instruction
To use the press in torque limiting, proceed as follows:
1.Insert a positioning instruction with a setpoint position lower than the position of the stop. The "Next_command" parameter must have the value "At_motion_start" or "Immediately". (By default, when you insert the clamping instruction, the "Next_command" parameter of the previous positioning will automatically take the value "Immediately")
2.Insert a clamping instruction, and in it, fill in the force with which the press should press against the stop. If you wish to give a force setpoint using a user variable, it must be in "LREAL" format.
3.If the press has to maintain the setpoint force for a certain time, you must use the "wait delay" instruction.
4.Insert the instruction "stop clamping" to stop the torque limitation.
5.To release the press, if you perform a positioning in relative mode, give a position with a negative sign and if you perform a positioning in absolute mode, give a position value higher than the position of the stop.
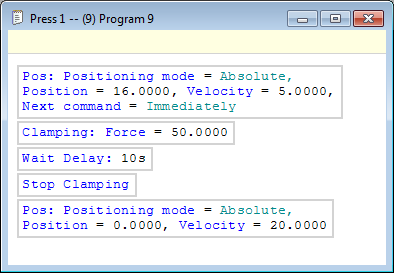
Figure 1: Example of a program for using the clamping
Below, the details of the instruction's input parameter:
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Force[N] |
Input |
LREAL |
100[N] |
Force setpoint of the clamping |
Table 1: Instruction parameter
Cancel torque limitation
To stop the torque limitation, you must use the instruction "stop clamping".
