
Presse universelle MecaMotion par 
"Force regulator" instruction
This instruction allows a constant force to be applied with the press for a defined time.
This force is measured with the external force sensor.
Use of the instruction
This instruction must be used when the press is in mechanical prestressing.
It can therefore be carried out after an "stop on force" instruction or after a positioning that brings the press to prestressing.
Standard parameters of the instruction:
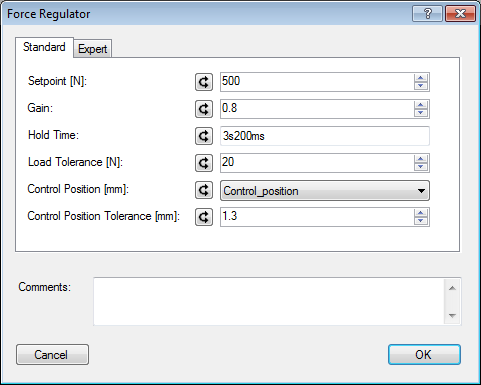
Figure 1: Standard parameters of the force regulation instruction
The standard parameters of this instruction are as follows:
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Setpoint [N] |
Input |
REAL |
1[N] |
Force setpoint to be applied |
Gain |
Input |
REAL |
1 |
Proportional gain of the regulation function |
Hold time [ms] |
|
TIME |
100[ms] |
Holding time of the applied force |
Load tolerance [N] |
Input |
REAL |
0.5[N] |
Tolerance +/- of the force setpoint in which the axis must be located at the end of the regulation so that there is no error |
Control position [mm] |
Input |
LREAL |
0[mm] |
Position that the axis must have at the end of the regulation. If position = 0 no control |
Control position tolerance [mm] |
Input |
LREAL |
1[mm] |
Tolerance +/- of the position in which the axis must be at the end of the regulation so that there is no error |
Table 2: List of standard parameters of the instruction
If necessary, it is possible to refine the regulation settings using the expert parameters.

Figure 2: Expert parameters of the force regulation instruction
The expert parameters available for this instruction are as follows:
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Velocity limitation [mm/s] |
Input |
REAL |
1[mm/s] |
Maximum velocity that the axis can reach when it performs the regulation |
Integral |
Input |
REAL |
1[ms] |
Integral of the regulation function |
Derivative |
Input |
REAL |
1[ms] |
Derivative of the regulation function |
Deadband [N] |
Input |
REAL |
1[N] |
Zone +/- of the force set point in which the axis regulation is stopped |
Table 2: List of expert parameters of the instruction
Results of the instruction
When the instruction is completed, the position and force measured at the end of the holding time are returned. (In progress)
Errors in the instruction
The possible errors for the force regulation instruction are as follows: (Errors returned by Profinet)
•Error N°24: Position out of tolerance
•Error N°25: Force out of tolerance
Example of use: In this example, we perform a positioning with a force stop to bring the press to prestressing, then we apply a force of 500N for 3.2s.  Figure 3: Use of the force regulation instruction |
