
Presse universelle MecaMotion par 
Instruction contrôle "Détection signal min"
Cette instruction permet de détecter dans une plage de contrôle donnée par un signal de trigger, la valeur minimale qu'atteindra le signal à mesurer.
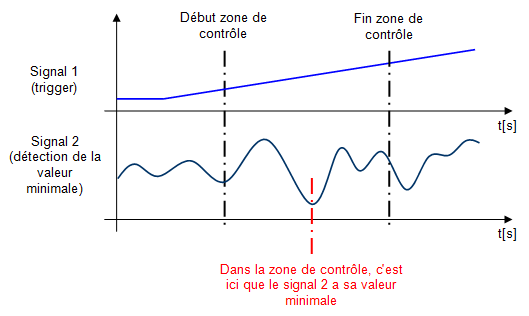
Figure 1: Explication générale du contrôle
Les signaux qui peuvent être définis comme trigger sont le suivants:
•Position de l'axe
•Détecteur de force
•Signal du palpeur
Pour chacun de ces signaux, il est possible de donner la zone dans laquelle la fonction de contrôle va travailler, ou réaliser le contrôle durant tout le positionnement.
Il est possible de chercher la valeur minimale de trois signaux différents:
•Position de l'axe
•Détecteur de force
•Signal du palpeur
Dès que le signal de trigger sera sorti de la zone de contrôle, la valeur minimale trouvée sera stockée dans la variable utilisateur choisi au format LREAL.
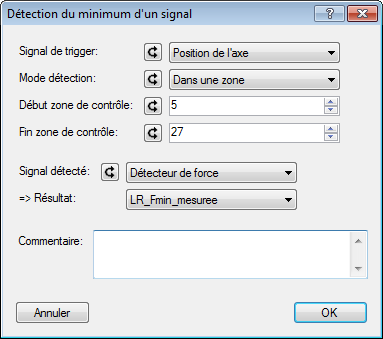
Figure 2: Exemple de programmation de détection de la force min lorsque l'axe est entre 5[mm] et 27[mm]
Ci-dessous, la liste des paramètres d'entrées et sorties de l'instruction :
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Signal de trigger |
Entrée |
Enum [Source signal] |
Position de l'axe |
Signal de trigger de la fonction, palpeur, position de l'axe ou détecteur de force |
Mode de détection |
Entrée |
Enum [Zone ou positionnement] |
Dans une zone |
Mode de détection, dans une zone de positionnement ou tout le positionnement |
Début zone de contrôle |
Entrée |
LREAL |
0 |
Position de début de la zone de contrôle |
Fin zone de contrôle |
Entrée |
LREAL |
0 |
Position de fin de la zone de contrôle |
Signal détecté |
Entrée |
Enum [Source signal] |
Détecteur de force |
Signal détecté, palpeur, position de l'axe ou détecteur de force |
Résultat |
Sortie |
LREAL |
-- |
Valeur minimale mesurée pendant la détection |
Tableau 1: Liste des paramètres de l'instruction
Exemple d'utilisation: Nous souhaitons détecter la force minimum que mesure le capteur de force, lorsque l'axe se déplace de la position absolue 25[mm] à la position absolue 45 [mm].  Figure 3: Exemple utilisation de la détection de signal min Ci dessous, le code machine utilisé pour l'exemple ci-dessus. 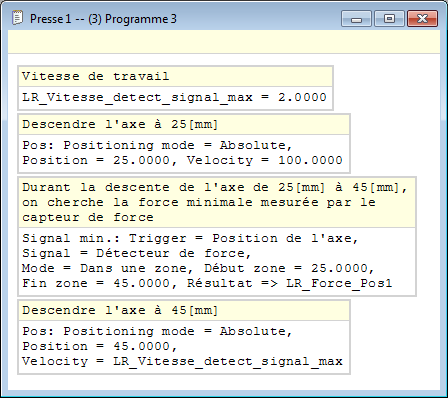 Figure 4: Programme pour détection de la force min entre 25 et 45[mm] |
Remarque: L'échantillonnage de la force se fait toutes les 2[ms]. Si un pic du signal à mesurer survient entre deux échantillonnages, il ne sera pas détecté.
