
Presse universelle MecaMotion par 
Instruction "Mesure position"
Cette instruction permet d'enregistrer la position de l'axe lorsqu'on actionne l'interrupteur de précision.
Le but étant de pouvoir mesurer la référence d'une pièce pour réaliser le décalage de l'enveloppe ou pour avoir une cote de départ afin de réaliser une insertion.
Cette fonction est utilisable avec une vitesse de descente de la presse de 10mm/s maximum.
Utilisation de l'instruction
Cette instruction doit se trouver avant le positionnement dans lequel vous souhaitez faire la mesure.
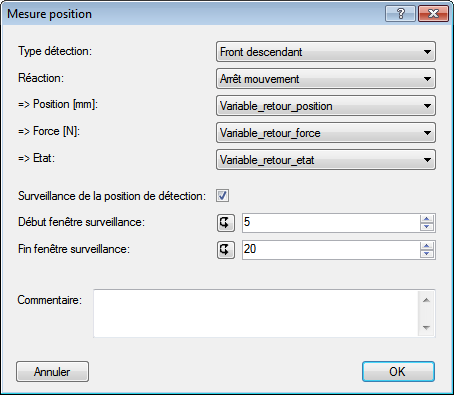
Figure 1: Paramètres de l'instruction mesure position
Ci-dessous, la liste des paramètres d'entrées et sorties de l'instruction :
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Type de détection |
Entrée |
-- |
Front descendant |
Type de détection, front descendant ou front montant |
Réaction |
Entrée |
-- |
Arrêt mouvement |
Réaction après mesure, arrêt mouvement ou continuer mouvement |
Position [mm] |
Sortie |
LREAL |
-- |
Position de l'axe mesurée au moment de la détection |
Force [N] |
Sortie |
LREAL |
-- |
Force mesurée au moment de la détection |
Etat |
Sortie |
Enum [Etat mesure position] |
-- |
Etat de la fonction de mesure (voir description ci-dessous) |
Surveillance de la position de détection |
Entrée |
-- |
-- |
Effectuer la détection uniquement dans une zone de position |
Début fenêtre surveillance [mm] |
Entrée |
LREAL |
0[mm] |
Position de début de la détection |
Fin fenêtre surveillance [mm] |
Entrée |
LREAL |
0[mm] |
Position de fin de la détection |
Tableau 1: Liste des paramètres de l'instruction
Détail des paramètres à renseigner pour cette fonction :
•Type de détection : Front descendant si vous souhaitez enregistrer la position de l'axe lorsqu'on appuie sur le capteur ou front montant si vous souhaitez enregistrer la position de l'axe lorsqu'on libère le capteur (remontée de l'axe).
•Réaction : Arrêt mouvement ou continuer le mouvement après commutation du capteur.
•Variables de retour : Les variables de retour de position et de force doivent être de type "LREAL" et la variable de retour d'état doit être de type "Etat mesure position". Les états possible sont : 1 = Attente de la commutation du capteur (la fonction de mesure est active), 2 = Le capteur de mesure a commuté, 3 = la mesure est terminée avec erreur (la mesure n'a pas pu être effectuée).
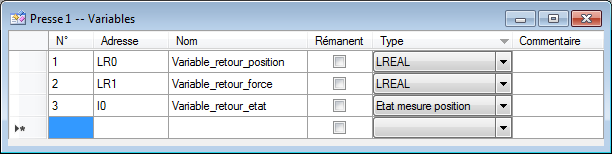
Figure 2: Déclaration des variables
Si besoin, vous pouvez réaliser cette mesure dans une certaine plage de position de l'axe. Pour se faire, cochez la case "Surveillance de la position de détection" et entrez une valeur de début et de fin de la zone en [mm]. Si vous souhaitez donner le début et la fin de zone à l'aide de variables, celles-ci doivent être au format LREAL.
Exemple d'utilisation: Nous voulons mesurer une position de référence avec l'interrupteur de précision. Nous effectuons la mesure à vitesse lente pour obtenir une grande précision. Dans l'exemple ci dessous, nous effectuons un déplacement jusqu'à la préposition à vitesse rapide puis, nous effectuons la mesure à vitesse lente. Lorsque l'interrupteur de précision commute, la position actuelle de l'axe est enregistrée dans la variable "LR_Reference_position". 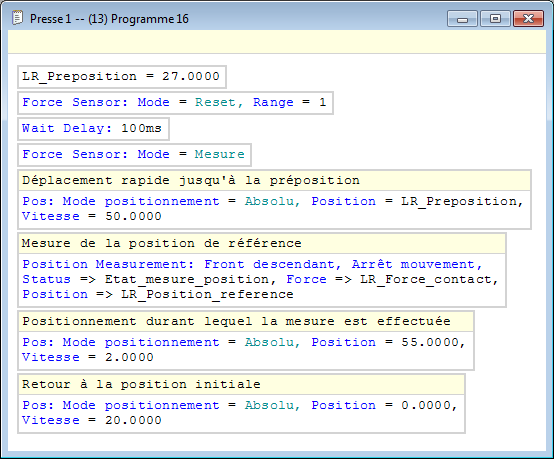 Figure 4: Exemple d'utilisation de l'instruction mesure position |
