
Presse universelle MecaMotion par 
"Positioning" instruction
This instruction allows you to perform the movements with the press.
The parameters of this instruction are divided into four distinct tabs:
•Standard parameters: Speed, position and absolute/relative mode.
•Limits : Force, position, speed and acceleration/deceleration.
•Velocity profile: Type of profile, acceleration and jerk
•Expert parameters: Mainly used for transitions between commands.
When the press is lowered, the axis position increases.
Standard parameters
In this tab, you define the minimum parameters for an axis movement.
If no other tabs are modified, the speed profile will be the default one. That is to say, the "Smooth" profile, the acceleration, deceleration and various jerks values will be the values given by the default parameters.
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Position [mm] |
Input |
LREAL |
0[mm] |
Position setpoint [mm] |
Velocity [mm/s] |
Input |
LREAL |
20[mm/s] |
Velocity setpoint [mm/s] |
Positioning mode |
Input |
EnumPositionningMode |
Absolute |
Positioning mode: absolute or relative |
Table 1: List of standard parameters
Explanation of the positioning mode
Two positioning modes are possible, absolute or relative.
In absolute mode, the position setpoint is given with respect to the axis reference position (0[mm]).
In relative mode, the position setpoint is given with respect to the current axis position.
Example, if the position setpoint is 20[mm], and the actual axis position is 30[mm]. (see figure 1)
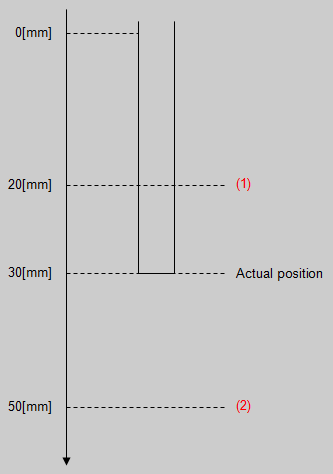 Figure 1: Difference between absolute and relative movement |
Limits Tab
From this tab, you can define the force, position, speed and acceleration/deceleration limits during positioning.
These limits have been created to reduce the risk of collision and reduce damage in the event of mechanical shock.
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Minimum force [N] |
Input |
LREAL |
0[N] |
Minimum force limit |
Maximum force [N] |
Input |
LREAL |
0[N] |
Maximum force limit |
Minimum position [mm] |
Input |
LREAL |
-5[mm] |
Minimum position limit |
Maximum position [mm] |
Input |
LREAL |
90[mm] |
Maximum position limit |
Maximum velocity [mm/s] |
Input |
LREAL |
200[mm/s] |
Velocity limit |
Maximum acceleration/deceleration [mm/s2] |
Input |
LREAL |
7000[mm/s2] |
Acceleration/deceleration limit |
Table 2: List of limits
Velocity Profile Tab
This tab allows you to program the speed profile, there are two different profiles to choose from.
•"Trapezoidal" velocity profile
•"Smooth" velocity profile
Depending on the selected velocity profile, it is possible to modify the different accelerations, decelerations and jerks.
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Positive acceleration [mm/s2] |
Input |
LREAL |
6000[mm/s2] |
Acceleration setpoint |
Negative acceleration [mm/s2] |
Input |
LREAL |
6000[mm/s2] |
Deceleration setpoint |
Positive acc. start jerk [mm/s3] |
Input |
LREAL |
50000[mm/s3] |
Jerk setpoint of the start of the acceleration phase |
Positive acc. end jerk [mm/s3] |
Input |
LREAL |
50000[mm/s3] |
Jerk setpoint of the end of the acceleration phase |
Negative acc. start jerk [mm/s3] |
Input |
LREAL |
50000[mm/s3] |
Jerk setpoint of the start of the deceleration phase |
Negative acc. end jerk [mm/s3] |
Input |
LREAL |
50000[mm/s3] |
Jerk setpoint of the end of the deceleration phase |
Velocity profile [-] |
Input |
EnumProfile |
Smooth |
Selection between the 2 profiles described below |
Table 3: List of velocity profile parameters
Explanation of existing velocity profiles
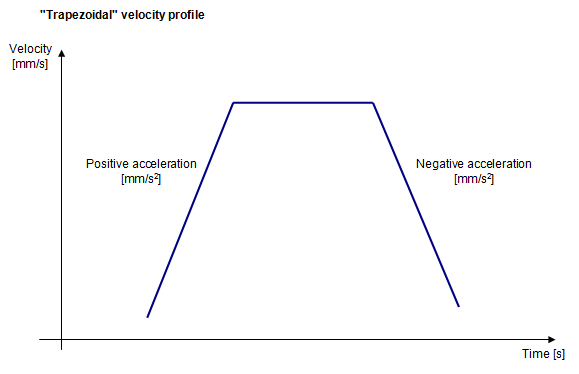
Figure 2: Trapezoidal profile
With the "Trapezoidal" velocity profile, you can change the acceleration[mm/s2] and deceleration[mm/s2] parameters.
The higher the acceleration, the faster the target velocity will be reached, and the higher the deceleration, the faster the axis will stop.
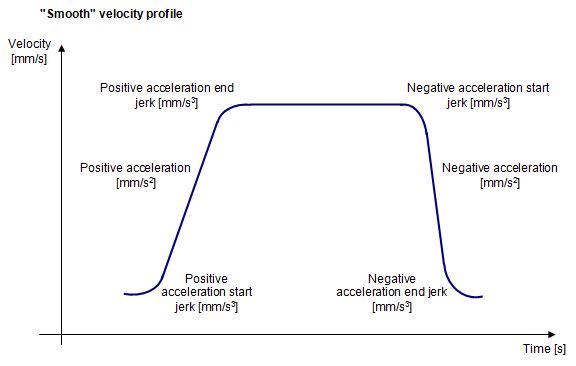
Figure 3: Smooth profile
With the "Smooth" velocity profile, in addition to the acceleration and deceleration parameters, you can adjust the different jerks of the movement.
The lower the jerks at the beginning of acceleration and beginning of deceleration, the slower the times for the acceleration and deceleration setpoints to be reached.
The adjustment of these different jerks is used to soften the movement.
Expert Tab
From this tab, you can define the types of transition between the controls and the positioning activation mode.
You can also choose to perform a positioning with the velocity, acceleration, deceleration and jerks setpoints from the previous positioning.
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Velocity type |
Input |
Enum |
User default |
Type of velocity definition. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed set velocity DIRECT(40) : Value entry CURRENT (33) : Current velocity RESULTING (312) : Resulting velocity at end of acceleration |
Positive acceleration type |
Input |
Enum |
Direct |
Type of positive acceleration definition. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed value DIRECT(40) : Value entry |
Negative acceleration type |
Input |
Enum |
Direct |
Type of negative acceleration definition. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed value DIRECT(40) : Value entry |
Positive acceleration start jerk type |
Input |
Enum |
Direct |
Type of definition for acceleration start jerk. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed jerk DIRECT(40) : Value entry |
Positive acceleration end jerk type |
Input |
Enum |
Direct |
Type of definition for acceleration end jerk. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed jerk DIRECT(40) : Value entry |
Negative acceleration start jerk type |
Input |
Enum |
Direct |
Type of definition for deceleration start jerk. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed jerk DIRECT(40) : Value entry |
Negative acceleration end jerk type |
Input |
Enum |
Direct |
Type of definition for deceleration end jerk. USER_DEFAULT (149) : User default EFFECTIVE (45) : Last programmed jerk DIRECT(40) : Value entry |
Blending mode |
Input |
Enum |
Inactive |
Specifies blending mode. USER_DEFAULT (149) : User default EFFECTIVE (45) : The last programmed blending value INACTIVE (61) : No blending ACTIVE (4) : Blending |
Merge mode |
Input |
Enum |
Sequential |
Specifies when the command takes effect relative to the motion. IMMEDIATELY (60) : Substitute current motion immediately SEQUENTIAL (119) : Command is attached to existing motion commands. NEXT_MOTION (89) : Command is attached to existing motion commands and buffer is cleared. SUPERIMPOSED_MOTION_MERGE (142) : Current motion is superimposed. |
Next command |
Input |
Enum |
When motion done |
Specifies condition for transition to next command. IMMEDIATELY (60) : Immediate command advance WHEN_BUFFER_READY (159) : After entry in the command queue AT_MOTION_START (13) : At start of interpolation WHEN_ACCELERATION_DONE (156) : At end of acceleration phase AT_DECELERATION_START (12) : At start of deceleration phase WHEN_INTERPOLATION_DONE (162) : At end of setpoint interpolation WHEN_MOTION_DONE (163) : When motion is completed |
Table 4: Expert parameters
