
Presse universelle MecaMotion par 
Instruction "Positionnement"
Cette instruction permet d'effectuer les mouvements avec l'axe de la presse.
Les paramètres de cette instruction sont divisés en quatre onglets distincts:
•Paramètres standards: Vitesse, position et mode absolu/relatif.
•Limites : Force,position, vitesse et accélération/décélération.
•Profil de vitesse: Type de profil, accélération et jerk
•Paramètres expert: Principalement utilisés pour les transitions entre les commandes.
Lorsque la presse descend, la position de l'axe augmente.
Paramètres standards
Sous cet onglet, vous définissez les paramètres minimums pour un déplacement de l'axe.
Si aucun autre onglet n'est modifié, le profil de vitesse sera celui par défaut. C'est-à-dire le profil "Smooth", les valeurs d'accélération, décélération ainsi que les différents jerks, seront les valeurs données par les paramètres par défaut.
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Position [mm] |
Entrée |
LREAL |
0[mm] |
Consigne de position [mm] |
Vitesse [mm/s] |
Entrée |
LREAL |
20[mm/s] |
Consigne de vitesse [mm/s] |
Mode de positionnement |
Entrée |
EnumPositionningMode |
Absolu |
Mode de positionnement : absolu ou relatif |
Tableau 1: Liste des paramètres standards
Explication du mode de positionnement
Deux modes de positionnement sont possibles, absolu ou relatif.
En mode absolu, la consigne de position est donnée par rapport à la position de référence de l'axe (0[mm]).
En mode relatif, la consigne de position est donnée par rapport à la position actuelle de l'axe.
Exemple, si la consigne de position est égale à 20[mm], et que la position actuelle de l'axe est égale à 30 [mm]. (voir figure 1)
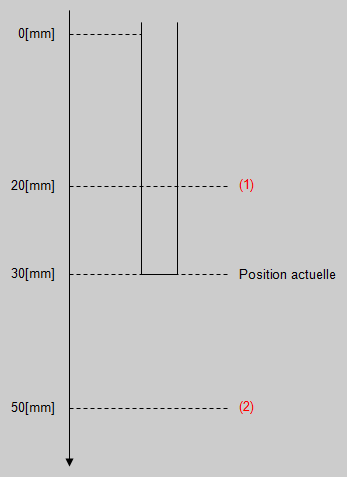 Figure 1: Différence entre mouvement absolu et relatif |
Onglet Limites
Depuis cet onglet, vous pouvez définir les limites de force, de position, de vitesse et d'accélération/décélération durant le positionnement.
Ces limites ont été créées pour diminuer les risques de collision et réduire les dégâts en cas de choque mécanique.
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Force minimale [N] |
Entrée |
LREAL |
0[N] |
Limite de force minimale |
Force maximale [N] |
Entrée |
LREAL |
0[N] |
Limite de force maximale |
Position minimale [mm] |
Entrée |
LREAL |
-5[mm] |
Limite de position minimale |
Position maximale [mm] |
Entrée |
LREAL |
90[mm] |
Limite de position maximale |
Vitesse maximale [mm/s] |
Entrée |
LREAL |
200[mm/s] |
Limite de vitesse |
Accélération/décélération maximale [mm/s2] |
Entrée |
LREAL |
7000[mm/s2] |
Limite d'accélération/décélération |
Tableau 2: Liste des limites
Onglet Profil de Vitesse
Cet onglet vous permet de programmer le profil de vitesse, il y a deux profils différents à choix.
•Profil de vitesse "Trapezoidal"
•Profil de vitesse "Smooth"
En fonction du profil de vitesse sélectionné, il est possible de modifier les différentes accélérations, décélérations et jerks.
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Accélération positive [mm/s2] |
Entrée |
LREAL |
6000[mm/s2] |
Consigne d'accélération |
Accélération négative [mm/s2] |
Entrée |
LREAL |
6000[mm/s2] |
Consigne de décélération |
Jerk début acc. positive [mm/s3] |
Entrée |
LREAL |
50000[mm/s3] |
Consigne du Jerk de début de phase accélération |
Jerk fin acc. positive [mm/s3] |
Entrée |
LREAL |
50000[mm/s3] |
Consigne du Jerk de fin de phase accélération |
Jerk début acc. négative [mm/s3] |
Entrée |
LREAL |
50000[mm/s3] |
Consigne du Jerk de début de phase décélération |
Jerk fin acc. négative [mm/s3] |
Entrée |
LREAL |
50000[mm/s3] |
Consigne du Jerk de fin de phase décélération |
Profil de vitesse [-] |
Entrée |
EnumProfile |
Smooth |
Sélection entre les 2 profils décrit ci-dessous |
Tableau 3: Liste des paramètres profil de vitesse
Explication des profils de vitesse existants
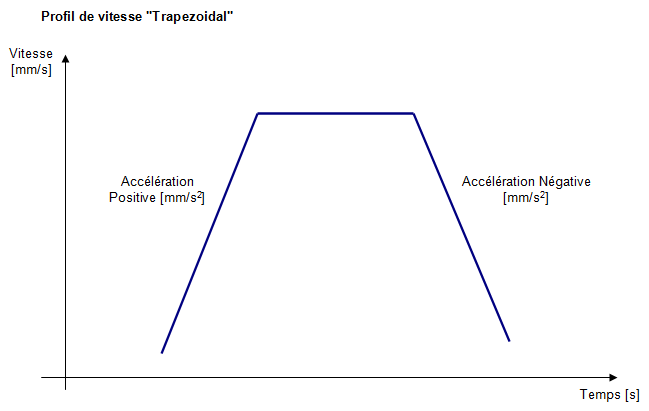
Figure 2: Profil Trapezoidal
Avec le profil de vitesse "Trapezoidal", vous pouvez modifier les paramètres d'accélération [mm/s2] et de décélération [mm/s2].
Plus l'accélération est élevée, plus la vitesse de consigne sera atteinte rapidement, et plus la décélération sera élevée plus l'axe s'arrêtera rapidement.
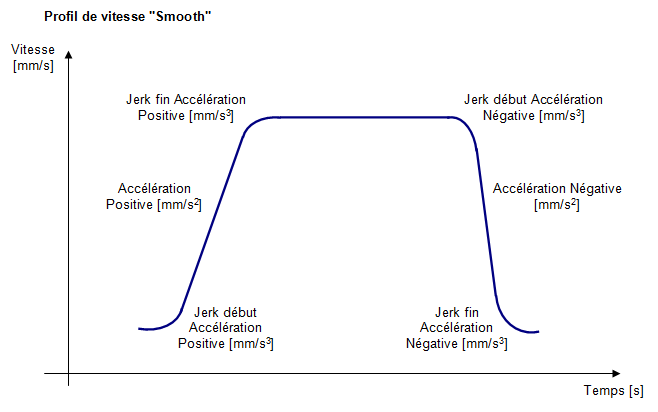
Figure 3: Profil Smooth
Avec le profil de vitesse "Smooth", en plus des paramètres d'accélération et décélération, vous pouvez ajuster les différents jerks du mouvement.
Plus les jerks de début d'accélération et début de décélération seront faibles, plus les temps pour que les consignes d'accélération, décélération soient atteinte seront lents.
Le réglage de ces différents jerks, est utilisé pour adoucir le mouvement.
Onglet Expert
Depuis cet onglet, vous pouvez définir les types de transition entre les commandes et le mode d'activation du positionnement.
Vous pouvez également choisir d'effectuer un positionnement avec les consignes de vitesse, d'accélération, de décélération et les jerks du positionnement précédent.
Ces commandes sont mise à disposition. Par contre, pour leurs utilisations nous vous retournons à la documentation Siemens
Nom du paramètre |
Déclaration |
Type de donnée |
Valeur par défaut |
Description |
|---|---|---|---|---|
Velocity type |
Entrée |
Enum |
User default |
Type de la spécification de vitesse USER_DEFAULT (149) : Préréglage utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie CURRENT (33) : Vitesse de consigne en interpolation RESULTING (312) : Vitesse résultante après diminution de l'accélération |
Positive acceleration type |
Entrée |
Enum |
Direct |
Type de la spécification de l'accélération positive USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie |
Negative acceleration type |
Entrée |
Enum |
Direct |
Type de la spécification de l'accélération négative USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie |
Positive acceleration start jerk type |
Entrée |
Enum |
Direct |
Type de la spécification du jerk de départ de l'accélération positive USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie |
Positive acceleration end jerk type |
Entrée |
Enum |
Direct |
Type de la spécification du jerk de fin de l'accélération positive USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie |
Negative acceleration start jerk type |
Entrée |
Enum |
Direct |
Type de la spécification du jerk de départ de l'accélération négative USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie |
Negative acceleration end jerk type |
Entrée |
Enum |
Direct |
Type de la spécification du jerk de fin de l'accélération négative USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier DIRECT(40) : Valeur saisie |
Blending mode |
Entrée |
Enum |
Inactive |
Spécification de la transition USER_DEFAULT (149) : Préréglé par l'utilisateur EFFECTIVE (45) : Valeur programmée en dernier INACTIVE (61) : Pas de transition ACTIVE (4) : Transition |
Merge mode |
Entrée |
Enum |
Sequential |
Indication sur l'activation du positionnement IMMEDIATELY (60) : Relayer immédiatement le mouvement actuel SEQUENTIAL (119) : Ajouter NEXT_MOTION (89) : Ajouter et effacer le tampon SUPERIMPOSED_MOTION_MERGE (142) : Superposer |
Next command |
Entrée |
Enum |
When motion done |
Indication de la condition de changement de commande IMMEDIATELY (60) : Transition à la commande immédiate WHEN_BUFFER_READY (159) : Après postage en file d'attente des commandes AT_MOTION_START (13) : Au départ de l'interpolation WHEN_ACCELERATION_DONE (156) : A la fin de la phase d'accélération AT_DECELERATION_START (12) : Au début de la phase de décélération WHEN_INTERPOLATION_DONE (162) : A la fin de l'interpolation de consigne WHEN_MOTION_DONE (163) : Lorsque le mouvement est terminé |
Tableau 4: Paramètres experts
