
Presse universelle MecaMotion par 
"Signal measurement" control instruction
This instruction is used to measure the value of an "X" signal when a trigger signal "Y" reaches a certain threshold.
For a measurement of the "X" signal to be made, the trigger signal must be either larger or smaller (depending on the type of comparison) than the value of the threshold parameter.
When the signal "X" is measured, it is multiplied by a factor "A" and an offset "B" is added. This factor and offset are function parameters (by default, the factor is set to 1 and the offset is set to 0). These parameters can come from a user variable or be given as constants.
The result stored in the return variable will be equal to:
Resulting measured value = Measured value at threshold * Factor A + Offset B

Figure 1: Graph explaining how the "Signal Measurement" control works
The signals that can be defined as triggers are as follows:
•Axis position
•Force sensor
•Measurement sensor signal
There are two types of trigger-to-threshold comparisons:
•Comparison ">': If the trigger signal is greater than or equal to the threshold => Recording the value of the measured signal.
•Comparison'<': If the trigger signal is smaller or equal to the threshold => Recording the value of the measured signal.
When the trigger signal passes the given threshold as a parameter, it is possible to record the value of one of the three signals below:
•Axis position
•Force sensor
•Measurement sensor signal
Below is a list of the instruction's input and output parameters:
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Trigger signal |
Input |
Enum [Signal source] |
Axis Position |
Comparison trigger signal, measuring sensor, axis position or force sensor |
Comparison |
Input |
Enum [Comparison] |
> |
Comparison type ">" or "<" |
Threshold |
Input |
LREAL |
0 |
Threshold that the trigger signal must reach to record the measured signal |
Measured signal |
Input |
Enum [Signal source] |
Force sensor |
Measured signal, measuring sensor, axis position or force sensor |
Factor |
Input |
LREAL |
1 |
Factor multiplied by the result |
Offset |
Input |
LREAL |
0 |
Offset added to the result |
Result |
Output |
LREAL |
-- |
Measured value when the comparison becomes true * factor + offset |
Table 1: List of instruction parameters
Tip: If the "result" variable must contain the value that has actually been measured, simply set the following offset and multiplication parameters: Factor A = 1 Offset B = 0 |
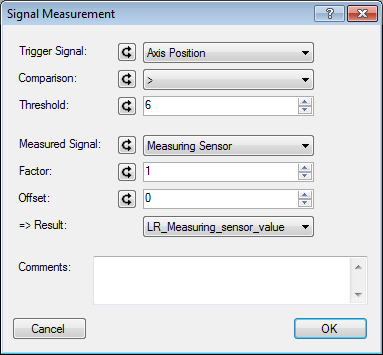
Figure 2: Example of programming the signal measurement control
Example of use: We would like to record the position of the axis at which the press begins to exert force on the part.  Figure 3: Schematic explanation of the operation In the program below, we make a movement towards the preposition at high velocity, then a movement at low velocity to come into contact with the part (Force > 5[N]), at this moment we record the position of the axis and we stop the movement.  Figure 4: Part program to record the position of the axis when the force > 5[N] |
