
Presse universelle MecaMotion par 
"Min signal detection" control instruction
This instruction allows to detect in a control area given by a trigger signal, the minimum value that the signal to be measured will reach.
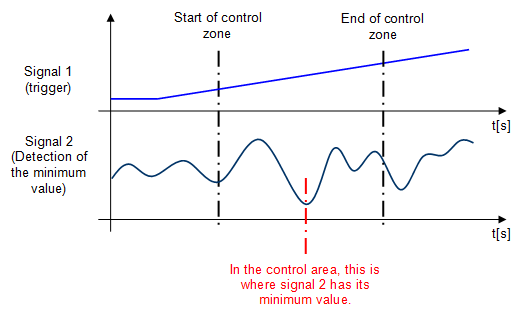
Figure 1: Explanatory graph of the control function
The signals that can be defined as triggers are as follows:
•Axis position
•Force sensor
•Measurement sensor signal
For each of these signals, it is possible to give the area in which the control function will work, or perform the control throughout the positioning.
It is possible to search for the maximum value of three different signals:
•Axis position
•Force sensor
•Measurement sensor signal
As soon as the trigger signal leaves the control area, the minimum value found will be stored in a user variable in LREAL format.

Figure 2: Example of programming to detect the minimum force when the axis position is between 5[mm] and 27[mm].
Below is a list of the instruction's input and output parameters:
Parameter name |
Declaration |
Type of data |
Default value |
Description |
|---|---|---|---|---|
Trigger signal |
Input |
Enum [Source signal] |
Axis position |
Function trigger signal, measuring sensor, axis position or force sensor |
Detection mode |
Input |
Enum [In a segment or entire positioning] |
In a segment |
Detection mode, In a segment or entire positioning |
Segment start point |
Input |
LREAL |
0 |
Start position of the control zone |
Segment end point |
Input |
LREAL |
0 |
End position of the control zone |
Detected signal |
Input |
Enum [Source signal] |
Force sensor |
Detected signal, measuring sensor, axis position or force sensor |
Résult |
Output |
LREAL |
-- |
Minimum value measured during detection |
Table 1: List of instruction parameters
Example of use: We want to detect the minimum force measured by the force sensor, when the axis moves from the absolute position 25[mm] to the absolute position 45[mm]. 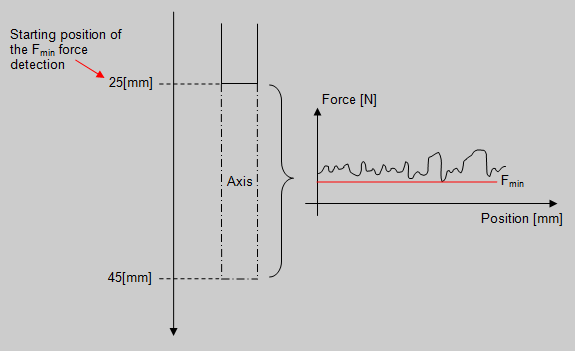 Figure 3: Example of using min signal detection Below, the program used for the example above. 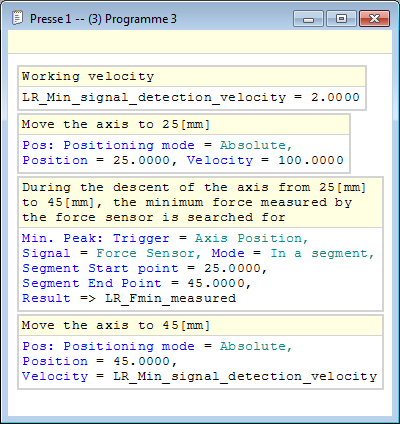 Figure 4: Program for minimum force detection between 25 and 45[mm] |
Note: The force sampling is done every 2[ms]. If a peak of the signal to be measured occurs between two samples, it will not be detected.
